Dataset
for UAV Navigation Inside Corridor Environments
nitrUAVCorridorV1
Details:
We
propose a new corridor dataset for UAV navigation, which contains the images as
captured by the UAV front camera and the deviations of the UAV with respect to a
Central Bisector Line (CBL) of the corridor in terms of translational and
rotational values. Translational deviation (in terms of angle in radian) is
utilized to rectify the side-wise shift of the UAV from the CBL, whereas the
rotational deviation (in terms of normalized pixel distance) is used to correct
the orientation of the UAV with respect to the CBL. The dataset contains 35000
training and 600 testing images for translation, and 21000 training and 300
testing images for rotation. These images are taken across 80 different
corridors of National Institute of Technology, Rourkela, India, out of which 59
and 21 corridor entries are utilized for training and testing purpose,
respectively.
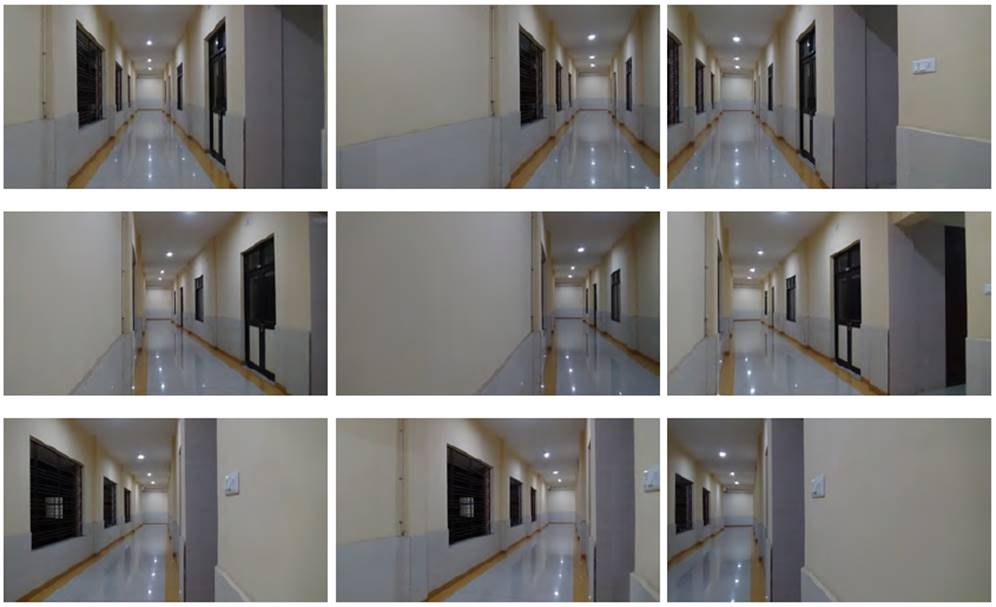
(Images
as captured by the UAV front camera from 9 different possible alignments over a
horizontal line perpendicular to the CBL. From top to bottom, the rows
represent the images, when the UAV is at the center,
extreme left and extreme right over the horizontal line, respectively. From
left to right, the columns represent the orientations towards center, left and right, respectively.)
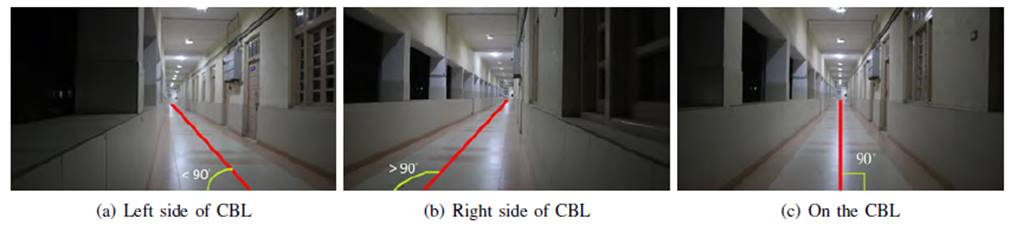
(Three different positions of the UAV over
a horizontal line perpendicular to the CBL.)
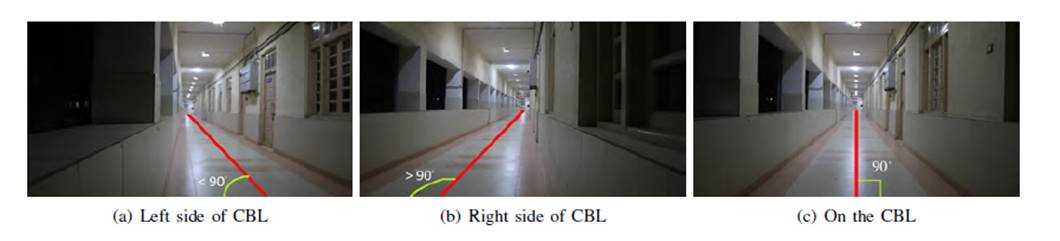
(Three
different orientations of the UAV, when it is situated on the CBL.)
N.B: Datasets are shared
in HDF5 file format, where the attributes xtrain and ytrain are used for input and target of the
training datasets, respectively and the attributes xtest and ytest are used for input and target of the
testing datasets, respectively.
Download
Link: NitrUAVCorridorV1.zip (windows)